La robotica scende in campo per gestire in modo innovativo le colture. L'agricoltura di precisione mira, infatti, a massimizzare sia resa e qualità delle colture, per ottenere una maggiore competitività e sostenibilità dei sistemi agricoli. La partnership tra la facoltà di Scienze agrarie alimentari e ambientali dell’Università Cattolica e l’Istituto Italiano di Tecnologia, che si concretizza nel laboratorio I-Leaf (Innovation Laboratory for Environment, Agriculture and Food), punta anche a questo obiettivo e lo fa attraverso lo sviluppo di una nuova generazione di agri-robot per il monitoraggio e la gestione innovativa dei sistemi colturali vegetali.
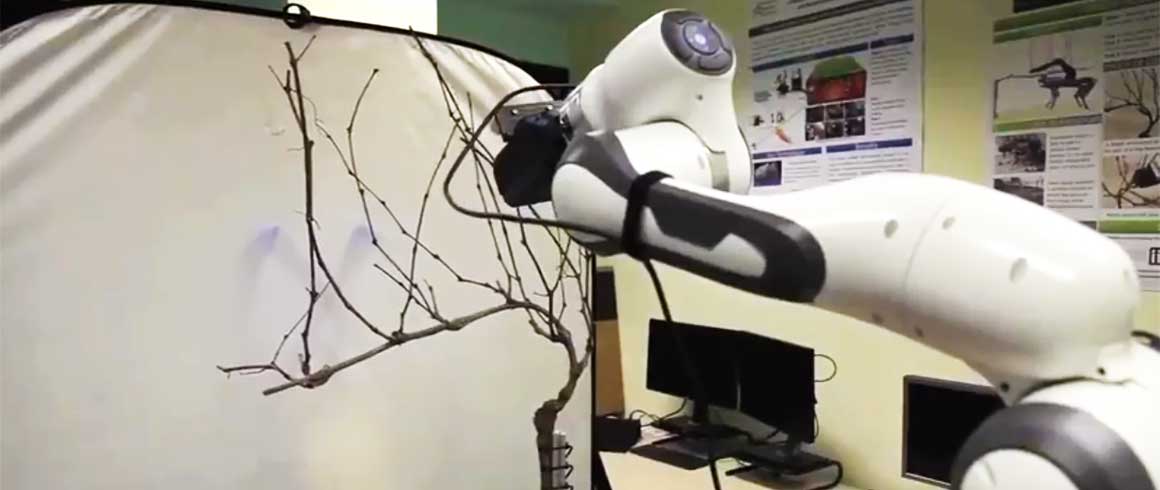
«Il progetto porterà allo sviluppo e all'applicazione di un nuovo robot da utilizzare in vigneto» spiega il professor Stefano Poni, direttore del Dipartimento di Scienze delle produzioni vegetali sostenibili. «Il robot sarà dotato di un sofisticato “vision system” in grado di localizzare e distinguere i vari organi presenti sulla parte area di un albero da frutto (in questa caso la vite) e di un “braccio intelligente”, che potrà eseguire interventi mirati e selettivi che, fino a oggi, solo la mano dell’uomo è in grado di compiere. Nella fattispecie, l’applicazione robotica riguarderà la complessa e affascinante operazione della potatura invernale in vigneto».
Un progetto che si avvantaggia dell'esperienza complementare di IIT (robotica e automazione) e Università Cattolica (produzione di colture sostenibili) per l'implementazione di un robot esistente sviluppato dall’Istituto Italiano di Tecnologia per applicazioni innovative in agricoltura. Un progetto che corre veloce: il primo prototipo sta infatti prendendo vita.


